Chrono G. Xay
- 91
- 3
- TL;DR Summary
- In threads I had started several years ago I was asking questions where I had been attempting to derive a number of algebraic equations for predicting the behavior of a clamped-edge circular membrane. Though I’m still proud of the attempts, the approaches I presented back then modeled the behavior merely from a visual standpoint, so I was swiftly proven wrong.
This is a ‘Take Two’ of those attempts.
A fresh start, hopefully with more humility and less self-deprecation.
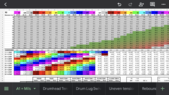
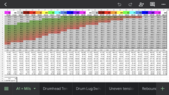
I am working on a project that would help guide aspiring drummers and percussionists in determining what thickness of drumhead to select for the tuning they want and/or the “feel” they want. (More on just what “feel” is later).
I’m trying to slowly work my way toward this starting with the tension a clamped-edge circular membrane. I understand that the unit for tension in this case is N/m, and is experienced by the membrane along its circumference. There’s a website called HyperPhysics where they actually have such an equation for the timpani: http://hyperphysics.phy-astr.gsu.edu/hbase/Music/cirmem.html
The equation they gave was:
$$f_1 = {0.766} \frac { \sqrt{T / σ}} {D}$$
I solved it for \text T to obtain
$$T = σ \left( \frac {D f_1} {0.766} \right) ^2$$
Based on some details they also provided… \text{mylar of thickness about 0.2 mm} I was able to define the area mass unit σ as $$σ = σ_M h$$ with σM as Mylar’s density of 1.390 kg/m3
and \text{“h”} as the membrane’s thickness. 7.5 mils is the closest to \text{0.2mm}, being a common drumhead thickness.
I emailed HyperPhysics to ask how they derived the multiplier “0.766” but they haven’t written back. The fact that such an equation has so little presence online is really confusing to me.[/sup]
I’m trying to slowly work my way toward this starting with the tension a clamped-edge circular membrane. I understand that the unit for tension in this case is N/m, and is experienced by the membrane along its circumference. There’s a website called HyperPhysics where they actually have such an equation for the timpani: http://hyperphysics.phy-astr.gsu.edu/hbase/Music/cirmem.html
The equation they gave was:
$$f_1 = {0.766} \frac { \sqrt{T / σ}} {D}$$
I solved it for \text T to obtain
$$T = σ \left( \frac {D f_1} {0.766} \right) ^2$$
Based on some details they also provided… \text{mylar of thickness about 0.2 mm} I was able to define the area mass unit σ as $$σ = σ_M h$$ with σM as Mylar’s density of 1.390 kg/m3
and \text{“h”} as the membrane’s thickness. 7.5 mils is the closest to \text{0.2mm}, being a common drumhead thickness.
I emailed HyperPhysics to ask how they derived the multiplier “0.766” but they haven’t written back. The fact that such an equation has so little presence online is really confusing to me.[/sup]
Last edited:





 The same is done for guitar strings.
The same is done for guitar strings.