Uchida
- 22
- 6
- Homework Statement
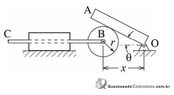
- The angular movement of the OA bar, shown in the figure above, is controlled by the horizontal movement of the BC axis, which moves from left to right within the guide. BC velocity is constant and equal to 3 m/s. At the instant shown in the figure, the distance between the center of the disc and the bar joint is x = 2 m. The disk with radius r = 1 m rolls without sliding on the bar OA. With regard to this mechanism, judge the following items:
The OA bar rotates clockwise with an angular speed equal to 30 rpm.
- Relevant Equations
- Trouble modelling the equations, tried to do with cinematics relations and trigonometrics equations. Got two different (wrong) results.
The answer to the problem is true (ω_OA = 30rpm)
First, I tried to model the disk-bar as a crank connecting rod, to the OA bar, and apply this:
VP = VB + ω_BP x r_P/B, where P is the contact point between the disc and OA bar.
I assumed VP = VP sin 30º i + VP cos 30º j (direction parallel to r_P/B), where r_P/B = sin 30º i + cos 30 j
This gave me:
VP sin 30º i + VP cos 30º j = 3 i - ω_BP cos 30º i + ω_BP sin 30º j.
Solving the linear system, a got VP = 1.5 m/s and ω_BP = 2.6 rad/s = 24.8 rpm.
Considering ω_OA = VP x r_A/O, I got ω_OA = ω_BP.So I tried another aproach:
Considering the x distance in time to be x(t) = 2 - 3t, sin θ(t) = 1/x(t) = 1/(2 - 3t)
Then: θ(t) = sin-¹ [1/(2 - 3t)], and ω_OA = dθ(t)/dt = sqrt(3)/2 rad/s = 8.27 rpm.I am having a lot o trouble solving these cinematics problems involving disk/bar contacts.
I am not able to model mathematically this.
VP = VB + ω_BP x r_P/B, where P is the contact point between the disc and OA bar.
I assumed VP = VP sin 30º i + VP cos 30º j (direction parallel to r_P/B), where r_P/B = sin 30º i + cos 30 j
This gave me:
VP sin 30º i + VP cos 30º j = 3 i - ω_BP cos 30º i + ω_BP sin 30º j.
Solving the linear system, a got VP = 1.5 m/s and ω_BP = 2.6 rad/s = 24.8 rpm.
Considering ω_OA = VP x r_A/O, I got ω_OA = ω_BP.So I tried another aproach:
Considering the x distance in time to be x(t) = 2 - 3t, sin θ(t) = 1/x(t) = 1/(2 - 3t)
Then: θ(t) = sin-¹ [1/(2 - 3t)], and ω_OA = dθ(t)/dt = sqrt(3)/2 rad/s = 8.27 rpm.I am having a lot o trouble solving these cinematics problems involving disk/bar contacts.
I am not able to model mathematically this.