- #1
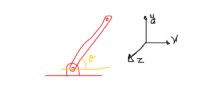
How Does Linkage Motion Affect Rotation and Yaw in 3D Space?
In summary, the article examines the mechanics of link movement in a three-dimensional space, specifically focusing on the rotation and yaw of a linkage system. It discusses the principles governing the movement along the X, Y, and Z axes, detailing how different forces and angles affect the linkage's orientation and stability. The exploration aims to enhance the understanding of mechanical linkages in various applications, such as robotics and engineering designs.