giraffe714
- 21
- 2
- Homework Statement
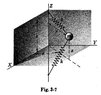
- The particle of mass m, shown in Fig. 3-7 below, is free to move to any position under the action of the two identical springs. When m is in equilibrium at the origin of the coordinate axes, the length S of either spring is greater than the unstretched length l_0.
Show that ##F_\phi = 0##.
Show that, for very small displacements from equilibrium, $$F_x = -2k(1 - \frac{l_0}{S})x, F_y = -2k(1 - \frac{l_0}{S})y, F_z = -2kz$$
- Relevant Equations
- ## F = -\frac{\partial V}{\partial q} ##, ## V_{spring} = \frac{1}{2} kx^2 ##
So at first I tried to express the potential energy as a function of x, y and z, but since I'm not quite sure about the geometry of the situation, I decided to separate out the potential energy into three components: ##V_x, V_y, V_z## (I'm pretty sure this is valid because in the partial derivative with respect to one coordinate all the parts of the potential energy not related to that coordinate will go to 0 as constants.)
I used the formula for the potential energy of a spring to get ## V_x = 2 * \frac{1}{2} kx^2 ## (2 out front because there's two springs.) But even after taking the derivative of that I didn't get anything in terms of the fraction of ## l_0 ## and ## S ##? What would that fraction even represent geometrically? I got ## F_x = -2kx ##, which interestingly enough would be the correct expression if I did this with the z coordinates, but the thing is with the z coordinates is that there's also the potential energy due to gravity to consider - mgz, so ## V_z = 2 * \frac{1}{2} kz^2 + mgz ##, but then the force becomes ## F_z = -2kz - mg ##?
And maybe setting up the equations of motion and then multiplying the expressions for ##\ddot{x}, \ddot{y}, \ddot{z}## by the mass (F = ma) would be easier, but I struggle to see how that'd be more correct? Plus, I'm not even sure how to derive an expression for the kinetic energy in this scenario.
As for showing that ##F_\phi = 0##, I know I need to derive an expression for the potential energy in terms of ##\phi##, but I'm not sure how to do that at all.
I used the formula for the potential energy of a spring to get ## V_x = 2 * \frac{1}{2} kx^2 ## (2 out front because there's two springs.) But even after taking the derivative of that I didn't get anything in terms of the fraction of ## l_0 ## and ## S ##? What would that fraction even represent geometrically? I got ## F_x = -2kx ##, which interestingly enough would be the correct expression if I did this with the z coordinates, but the thing is with the z coordinates is that there's also the potential energy due to gravity to consider - mgz, so ## V_z = 2 * \frac{1}{2} kz^2 + mgz ##, but then the force becomes ## F_z = -2kz - mg ##?
And maybe setting up the equations of motion and then multiplying the expressions for ##\ddot{x}, \ddot{y}, \ddot{z}## by the mass (F = ma) would be easier, but I struggle to see how that'd be more correct? Plus, I'm not even sure how to derive an expression for the kinetic energy in this scenario.
As for showing that ##F_\phi = 0##, I know I need to derive an expression for the potential energy in terms of ##\phi##, but I'm not sure how to do that at all.