Juanda
Gold Member
- 439
- 144
- TL;DR Summary
- Simple models of springs do not consider the speed of sound of the medium to transmit the forces. I would like to be able to understand and model a situation like that.
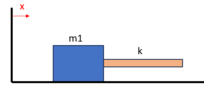
Let's assume a system composed of 2 masses connected by a linear spring resting on a horizontal, frictionless table.

If I apply a force on ##m_1## its possition will change and INMEDIATELY produce a force on ##m_2## due to the spring connecting them. This is tipically an accepted approximation to reality but it is known that the force through the spring can only travel at the propagation speed of the medium. Since that speed is often very big and the mass of the spring is negligable, the instantenous approximation makes sense almost always. However, I would like to be able to model it more realistically even if it is not that practical. Or, at least, not practical in any case I can imagine now.
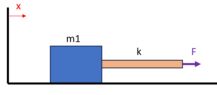
Springs are actually pretty complex geometries. As a simplification, let's say we have a connecting rod so its stiffness will be ##k=\frac{EA}{L}## where ##E## is the youg modulus, ##A## is the area of the cross section and ##L## is the undeformed length of the rod. Also, assume the rod has a linear density ##\rho## or assume its mass (whichever you find more convenient).
Secondly, the problem already feels hard enough by adding the inertia of the spring so to avoid having to deal with ##m_1## and ##m_2## let's just get rid of one of them. Then, imagine the force is applied at the end of the rod.

How would you model the dynamic behavior of such a problem to see how it evolves with time?
If I apply a force on ##m_1## its possition will change and INMEDIATELY produce a force on ##m_2## due to the spring connecting them. This is tipically an accepted approximation to reality but it is known that the force through the spring can only travel at the propagation speed of the medium. Since that speed is often very big and the mass of the spring is negligable, the instantenous approximation makes sense almost always. However, I would like to be able to model it more realistically even if it is not that practical. Or, at least, not practical in any case I can imagine now.
Springs are actually pretty complex geometries. As a simplification, let's say we have a connecting rod so its stiffness will be ##k=\frac{EA}{L}## where ##E## is the youg modulus, ##A## is the area of the cross section and ##L## is the undeformed length of the rod. Also, assume the rod has a linear density ##\rho## or assume its mass (whichever you find more convenient).
Secondly, the problem already feels hard enough by adding the inertia of the spring so to avoid having to deal with ##m_1## and ##m_2## let's just get rid of one of them. Then, imagine the force is applied at the end of the rod.
How would you model the dynamic behavior of such a problem to see how it evolves with time?
 .
.