Math Amateur
Gold Member
MHB
- 3,920
- 48
I am reading Jon Pierre Fortney's book: A Visual Introduction to Differential Forms and Calculus on Manifolds ... and am currently focused on Appendix A : Introduction to Tensors ...I need help to understand some statements/equations by Fortney concerning rank one tensors ...
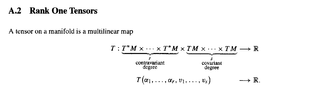
Those remarks by Fortney read as follows:
View attachment 8786
View attachment 8787In the above text by Fortney we read the following:
" ... ... Suppose we change the coordinates from $$(x^1, x^2, \ ... \ ... \ , x^n )$$ to $$(u^1, u^2, \ ... \ ... \ , u^n )$$ using the $$n$$ functions
$$u^1 (x^1, x^2, \ ... \ ... \ , x^n ) = u_1 $$
$$u^2 (x^1, x^2, \ ... \ ... \ , x^n ) = u_2$$
... ...
... ...
$$u^n (x^1, x^2, \ ... \ ... \ , x^n ) = u_n$$ ... ... "
My question is as follows:
What do the equations $$u^i (x^1, x^2, \ ... \ ... \ , x^n ) = u_i$$ mean ... ? ... how do we interpret them ...?
What would it mean for example if we wanted to form the differentials $$du^i$$ ... ?Help will be appreciated ...
Peter
EDIT ... Reflecting on the above ... a further question ... are the coordinate functions $$ (x^1, x^2, \ ... \ ... \ , x^n )$$ essentially a basis for M ... (I am assuming the manifold is a vector space ... hmmm bt not sure it is ...?)
Hope someone can clarify ...
Peter
Those remarks by Fortney read as follows:
View attachment 8786
View attachment 8787In the above text by Fortney we read the following:
" ... ... Suppose we change the coordinates from $$(x^1, x^2, \ ... \ ... \ , x^n )$$ to $$(u^1, u^2, \ ... \ ... \ , u^n )$$ using the $$n$$ functions
$$u^1 (x^1, x^2, \ ... \ ... \ , x^n ) = u_1 $$
$$u^2 (x^1, x^2, \ ... \ ... \ , x^n ) = u_2$$
... ...
... ...
$$u^n (x^1, x^2, \ ... \ ... \ , x^n ) = u_n$$ ... ... "
My question is as follows:
What do the equations $$u^i (x^1, x^2, \ ... \ ... \ , x^n ) = u_i$$ mean ... ? ... how do we interpret them ...?
What would it mean for example if we wanted to form the differentials $$du^i$$ ... ?Help will be appreciated ...
Peter
EDIT ... Reflecting on the above ... a further question ... are the coordinate functions $$ (x^1, x^2, \ ... \ ... \ , x^n )$$ essentially a basis for M ... (I am assuming the manifold is a vector space ... hmmm bt not sure it is ...?)
Hope someone can clarify ...
Peter
Attachments

Last edited: