zoltrix
- 85
- 7
hello
I am a simscape mulibody user
take a four bars mechanism, no external load
you apply a constant torque to the crank
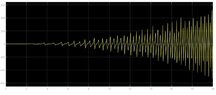
I would expect a periodic angular acceleration but acceleration keeps growing
anybody here using simscape mechanics ?
what's wrong ?
I am a simscape mulibody user
take a four bars mechanism, no external load
you apply a constant torque to the crank
I would expect a periodic angular acceleration but acceleration keeps growing
anybody here using simscape mechanics ?
what's wrong ?