simphys
- 327
- 46
- Homework Statement
- The question that is asked is basically to create a closed loop model with a PID controller. (if necessary more information on the picture)
The problem that I am encountering is an error which I don't understand and know how to fix?
- Relevant Equations
- not relevant
Could I get some input on how to fix this problem please? Thanks in advance!
The exercise for which I need the model.


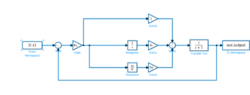
The simulink model together + the error that needs to be fixed + Matlab code used:
Note: Gain 1 = 1/Ti
The exercise for which I need the model.
The simulink model together + the error that needs to be fixed + Matlab code used:
Note: Gain 1 = 1/Ti