tomul
- 9
- 1
- Homework Statement
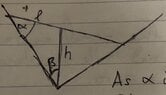
- A uniform bar of length L and weight W is supported at its ends by two inclined planes as shown in the attached diagram. From the principle of virtual work, find the angle α at which the bar is in equilibrium. (Neglect friction)
- Relevant Equations
- For a system in equilibrium, the work done over a virtual displacement is zero:
ΣFd = 0
I imagined the bar slipping along a virtual displacement, with the top and the bottom slipping by equal amounts. Since the planes are orthogonal, I took the components of these displacements: the lower end is displaced Lsinα in the direction of the right plane and by Lcosα in the direction of the left plane. For the lower end I used the remaining angle in the triangle, 180-90-α = 90-α, giving components -Lsin(90-α)=-Lcosα and -Lcos(90-α)=-Lsinα. I then broke the bar into five points, one at its leftmost tip, one mid way between the centre and the leftmost tip, one at the centre, one mid way between the centre and the rightmost tip, and one at its rightmost tip. I assumed that the distance from the centre would be proportional to the fraction of the displacement of the tips which that point moves, so the center would have no displacement, and the two midpoints would have a displacement of components 1/2 Lcosα, 1/2 L sinα, -1/2Lcosα, and -Lsinα. Since the bar is uniform, both halfs of the bar can be thought of as having the weight acting from the two midpoints so the work done for each of the components would be W/2 L cosα, W/2 L sinα, -W/2 L cosα, and -W/2 Lsinα. Using the principle of virtual work, these should sum to zero:
W/2 L cosα + W/2 L sinα - W/2 L cosα - W/2 L sinα = 0
Dividing the equation by ( cosα W/2 L ) gives:
1 + tanα - 1 - tanα = 0
tan α = tan α
α = arctan(tan α)
α = α
Which is not exactly useful for finding α. What mistake did I make which brought me to this dead-end?
W/2 L cosα + W/2 L sinα - W/2 L cosα - W/2 L sinα = 0
Dividing the equation by ( cosα W/2 L ) gives:
1 + tanα - 1 - tanα = 0
tan α = tan α
α = arctan(tan α)
α = α
Which is not exactly useful for finding α. What mistake did I make which brought me to this dead-end?
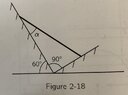
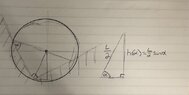
 ),I get that $$\frac{1}{\tan a}=\tan 60$$
),I get that $$\frac{1}{\tan a}=\tan 60$$