bhupesh
- 22
- 5
- Homework Statement
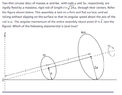
- A diagram of a complex rigid body is given in the attached files having two discs of different sizes joined by a massless rod, statement of the question is given the picture in the attached files, I had doubt in one of the statements related to the rigid body given, that is its angular velocity of the center of mass of the whole system about z axis is w/5
- Relevant Equations
- for a point at a distance r from an axis of a rotating body , its velocity v=w x r
let point of contact of smaller disc with ground be P and
center of smaller disc be C and center of bigger disc be C'
angle POC= @
I assumed the angular velocity of the center of mass of the two discs about z axis to be w1
note that angular velocity of center of mass of both discs and center of anyone disc about z axis is same, you can verify that if you want, me after verifying it will use it to decrease the length of the my attempt section here
by applying Pythagoras theorem OP=5a, sin@=1/5
R=distance of center C from z axis = L*cos@, by some trigonometry
as the the discs are pure rolling on the ground, if we assume velocity of C of disc as V out of the plane of paper then the velocity of point P=V-wa=0( by condition for pure rolling)
V=wa
now by V=w1 x R
wa =w1 x L cos@
w1=5w/24
but the statement given further in the question that was cut out mentions the angular velocity about z axis as w/5
So I tried a more basic approach and got the answer , that approach is written further
if the the smaller disc rotates by angle 2pie in time t
then w= 2pie/t
t=2pie/w
as the smaller disc covers a circle of radius OP=5a for one rotation about the z axis, so the disc covers a circle of 2pie*5a
the smaller disc rotates by 2pie and covers distance 2pie*a for every complete turn, so it turns by 10 pie in one full rotation around z axis
in time 5*t so, w1 about z axis =2pie/5t
by this w1=w/5,
now i am in a dilemma why the first approach is wrong and the second one right?
note that angular velocity of center of mass of both discs and center of anyone disc about z axis is same, you can verify that if you want, me after verifying it will use it to decrease the length of the my attempt section here
by applying Pythagoras theorem OP=5a, sin@=1/5
R=distance of center C from z axis = L*cos@, by some trigonometry
as the the discs are pure rolling on the ground, if we assume velocity of C of disc as V out of the plane of paper then the velocity of point P=V-wa=0( by condition for pure rolling)
V=wa
now by V=w1 x R
wa =w1 x L cos@
w1=5w/24
but the statement given further in the question that was cut out mentions the angular velocity about z axis as w/5
So I tried a more basic approach and got the answer , that approach is written further
if the the smaller disc rotates by angle 2pie in time t
then w= 2pie/t
t=2pie/w
as the smaller disc covers a circle of radius OP=5a for one rotation about the z axis, so the disc covers a circle of 2pie*5a
the smaller disc rotates by 2pie and covers distance 2pie*a for every complete turn, so it turns by 10 pie in one full rotation around z axis
in time 5*t so, w1 about z axis =2pie/5t
by this w1=w/5,
now i am in a dilemma why the first approach is wrong and the second one right?