Thermofox
- 144
- 26
- Homework Statement
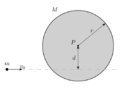
- A disk of mass ##M=2kg## and radius ##r = 20 cm##, is arranged vertically and fixed to a pin, ##P##, around which it can rotate without friction. A projectile, to be considered as a point of mass, has a mass of ##m =100 g##. Initially it has a constant velocity, ##v_0##. Then the projectile hits the disk. The collision is completely inelastic. ##d =10 cm## is the distance between the point of collision and the axis of the disk.
- Relevant Equations
- ##\Sigma \tau= I \alpha##
I'm asked to find 2 things:
1) The minimum value of the velocity ##v_0## that allows ##m##
to complete a full revolution around the disk
2) the value of the pulse provided by the pin to the disc at the moment of impact.
My thinking:
I don't understand why the problem asks me to find a minimum velocity. If the disk can rotate without friction what opposes to its rotation? Shouldn't it continue to rotate, indefinitely? Shouldn't it conserve its kinetic rotational energy?
There is a conservation of angular momentum, but not linear momentum because there is the reaction of the pin, which is an external force.
I assume the motion of the rotation to be uniformly accelerated => ##\theta (T) = \theta_{i} + \omega_i T + \frac 1 2 \alpha T^2## ; ##2\pi= \frac 1 2 \alpha T^2##, where ##T## is the time it takes to do a revolution.
For point 2 maybe, since the pulse, ##I##, is generated only by the pin => ##I= \Delta P##?
1) The minimum value of the velocity ##v_0## that allows ##m##
to complete a full revolution around the disk
2) the value of the pulse provided by the pin to the disc at the moment of impact.
My thinking:
I don't understand why the problem asks me to find a minimum velocity. If the disk can rotate without friction what opposes to its rotation? Shouldn't it continue to rotate, indefinitely? Shouldn't it conserve its kinetic rotational energy?
There is a conservation of angular momentum, but not linear momentum because there is the reaction of the pin, which is an external force.
I assume the motion of the rotation to be uniformly accelerated => ##\theta (T) = \theta_{i} + \omega_i T + \frac 1 2 \alpha T^2## ; ##2\pi= \frac 1 2 \alpha T^2##, where ##T## is the time it takes to do a revolution.
For point 2 maybe, since the pulse, ##I##, is generated only by the pin => ##I= \Delta P##?
Attachments
Last edited: